robot end effector pdf
Motion of the robot end-effector. As other robotic mechanisms.

Pdf Manual Serial Arm Thanh An Truong Academia Edu
Inverse kinematics IK determines joint configurations of a robot model to achieve a desired end-effect position.

. A simple collaborative robot cobot is a perfect example of a non-intelligent robot. An end-effector also called a robot hand can be attached to the end of the chain. This way the end effector or the link that is furthest away from the base can be made to assume any position or orientation within some range.
Niryo Ones conception makes it precise in complex situations but still accessible. 1 Robot is derived from Czech word A. Its 6 axis allow it to reproduce all the movements required for the most advanced uses.
Leg to control a single rotational freedom at the end-effector platform about the axis perpendicular to the platform. You can also specify external constraints like an aiming constraint for a camera arm or a Cartesian bounding box on a certain rigid body link. Niryo One is a robot arm created for robotic learningWith its three Dynamixel XL servomotors and its NiryoSteppers it facilitates the learning of robotics in an environment true to the industrial reality.
Free download in PDF Robotics Objective Type QuestionsMCQs Answers. The classical method to find the position of an end effector is by solving the inverse kinematics. The end effector is also designed such that to lift the sheet we use suction cups were the sheet is uplifted with a certain pressure.
The remainder of this document will focus only on the 3-dof XYZ translation-only Delta Robot since that is being widely applied by 3D printers and Arduino hobbyists. JERSEY CITY NJ Feb. These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability.
Inverse kinematics is finding the joint values of the robot arm for the given position p and orientation o. 25012018 JNassour 6 Centrifugal Force. Since 1921 when Czech playwright Karel Capek introduced the notion and coined the term robot in his play Rossoms Universal Robots robots have taken on increasingly.
It is our hope that by the end of this article the reader will be able to make a more informed decision about robotic surgery before chasing the market BACKGROUND AND HISTORY OF SURGICAL ROBOTS. Its direction is always orthogonal to the velocity of the body and towards the fixed point of the instantaneous center of curvature of the path. For example robot arms in automotive assembly lines perform a variety of tasks such as welding and parts.
Establishing an initial expression see figure below for the pose of the end effector was straight foward. 2 Acknowledgements This work is carried out at the Department of. 该工具箱内的说明书是robotpdf 也可查阅 机器人工具箱简介ppt 3.
Robot kinematic constraints are specified in the rigidBodyTree robot model based on the transformation between joints. Such robots are usually taught a series of points with a. BTech MTech BE ME students an interview for various positions like Web Developer System Analyst etc.
That means it is located at the end of the arm and it has an effect such as grasping on objects within its reach. Common examples of end effectors include welding devices such as MIG-welding guns spot-welders etc spray guns and also grinding and deburring devices such as pneumatic disk or belt grinders burrs etc and grippers devices that can grasp an object usually electromechanical or. Go To Download Page Close.
The end effector of an industrial robot is one of the vital parts of the robot which is used by the robot to communicate with the environment. The simplest type of robot in this class is the point-to-point robot. Inverse Kinematics of Comau NM45.
These Objective Type questions on Computer Science are very useful for NIELIT BCA BSc. Now relatively old approaches to learning control are also enjoying an incredible surge in popularity fueled in part by massive computing power and increasingly available robot hardware and simulators. The Comau NM45 is an articulated arm with a spherical wrist.
However you choose to define a robot robotics involves designing building and programming physical robots which are able to interact with the physical world. Presented is a description of the 3-dof Delta Robot followed by kinematics analysis. If the robot wrist design is spherical ie.
Example of a robot. Peter Corke which Ive also found useful. 本仿真程序仿照fanuc_M20ia机器人进行建模 31 利用DH矩阵建立机器人模型modified 经测绘用如下代码建立DH矩阵 使用robotteach函数进行机器人示教.
Autodesk-Inventor 2017 Creo-Parametric robotic arm suction cups. Transformation matrix from base to end-effector is. 10252018 10 Robot Manipulator Classifications Servo robots-A point-to-point robot can be taught a discrete set of points but there is no control on the path of the end- effector in between taught points.
For inverse kinematics the inverse orientation and inverse position are needed. The gripping device is called an end effector. Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool.
Since a rigid body in space has six degrees of freedom the most general robots are designed to have six joints. Unlike learning for perception learning control algorithms are still far from a technology with some of the most impressive looking results still being hard to. 14 2022 PRNewswire -- Verified Market Research recently published a report Robot End Effector Market By Type Welding Guns Grippers Suction Cups By.
I found the Queensland University of Technology Robot Academy videos really useful and eventually bought a copy of Robots Vision and Control ed 2. The method that the controller uses to guide the end-effector. Therefore to place the end effector in the right position at the right time is the most challenging job for an industrial robot.
The grapple fixtures are attached to the objects the RMS is trying to grasp. The end effector or robotic hand can be designed to perform any desired task such as welding gripping spinning etc depending on the application. With three joint axes.
External torques exerted on the end effector caused by the task 25012018 JNassour 5 A centripetal force is a force that makes a body follow a curved path. The most essential robot peripheral is the end effector or end-of-arm-tooling EOT. Only a small part of robotics involves artificial intelligence.
The RMSs end effector is a snare device that closes around special posts called grapple fixtures. Here we used Creo-Parametric for design and Autodesk-Inventor 2017 to simulate the designed model.

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping

Pdf Comparison Of Exoskeleton Robots And End Effector Robots On Training Methods And Gait Biomechanics Semantic Scholar

Robot End Effector Market Type Robot Type Application 2021 2030
Robot End Effector Definition And Examples

Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot

Pdf Development Of A Robotic End Effector Of Drilling And Fasteners Inserter For Aircraft Structures
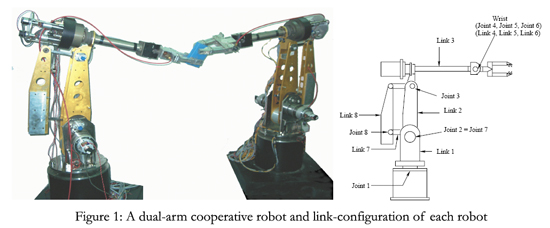
A Dual Arm Cooperative Robot

Robot End Effector Wikiwand

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar
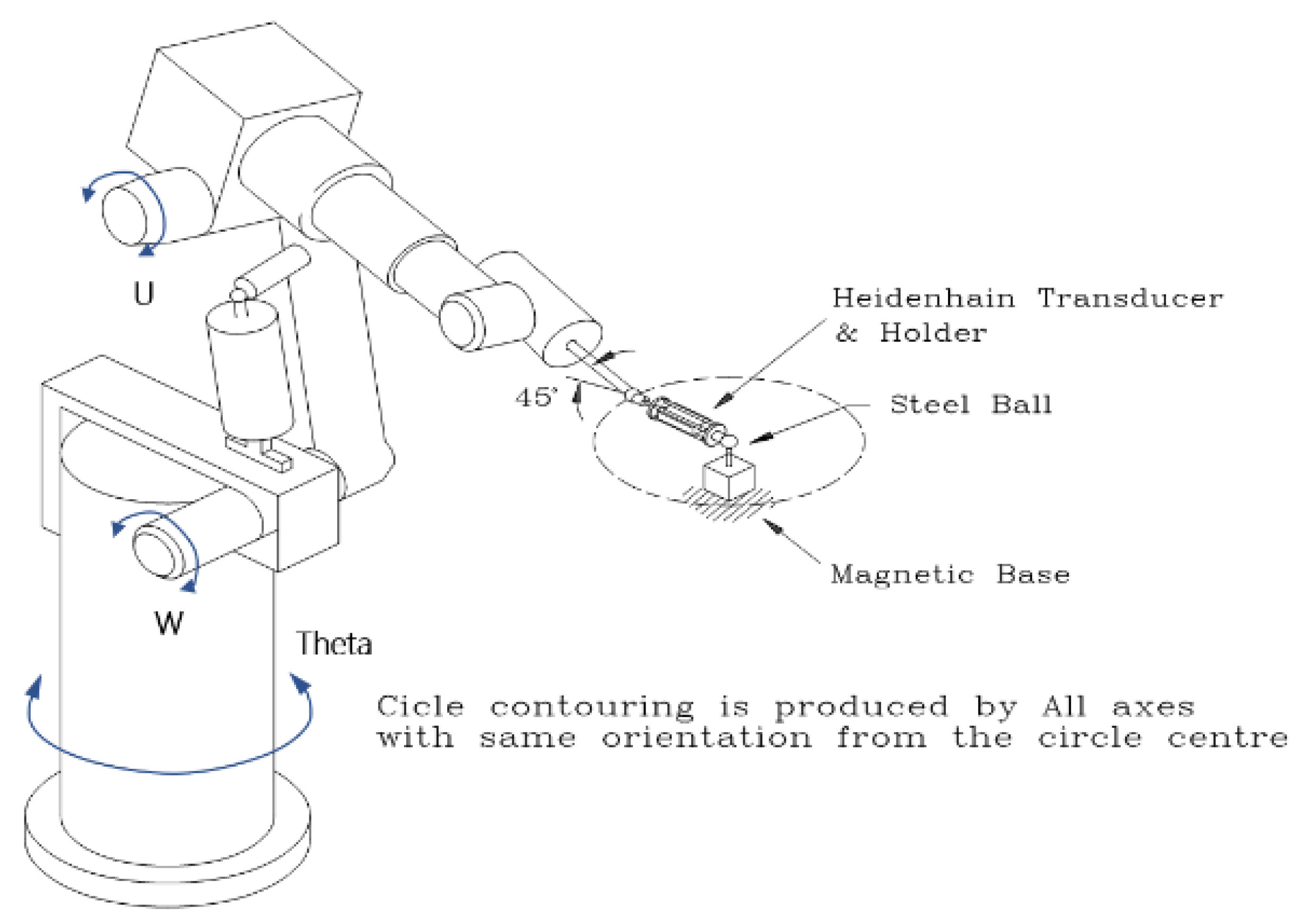
Applied Sciences Free Full Text Study Of Orientation Error On Robot End Effector And Volumetric Error Of Articulated Robot Html
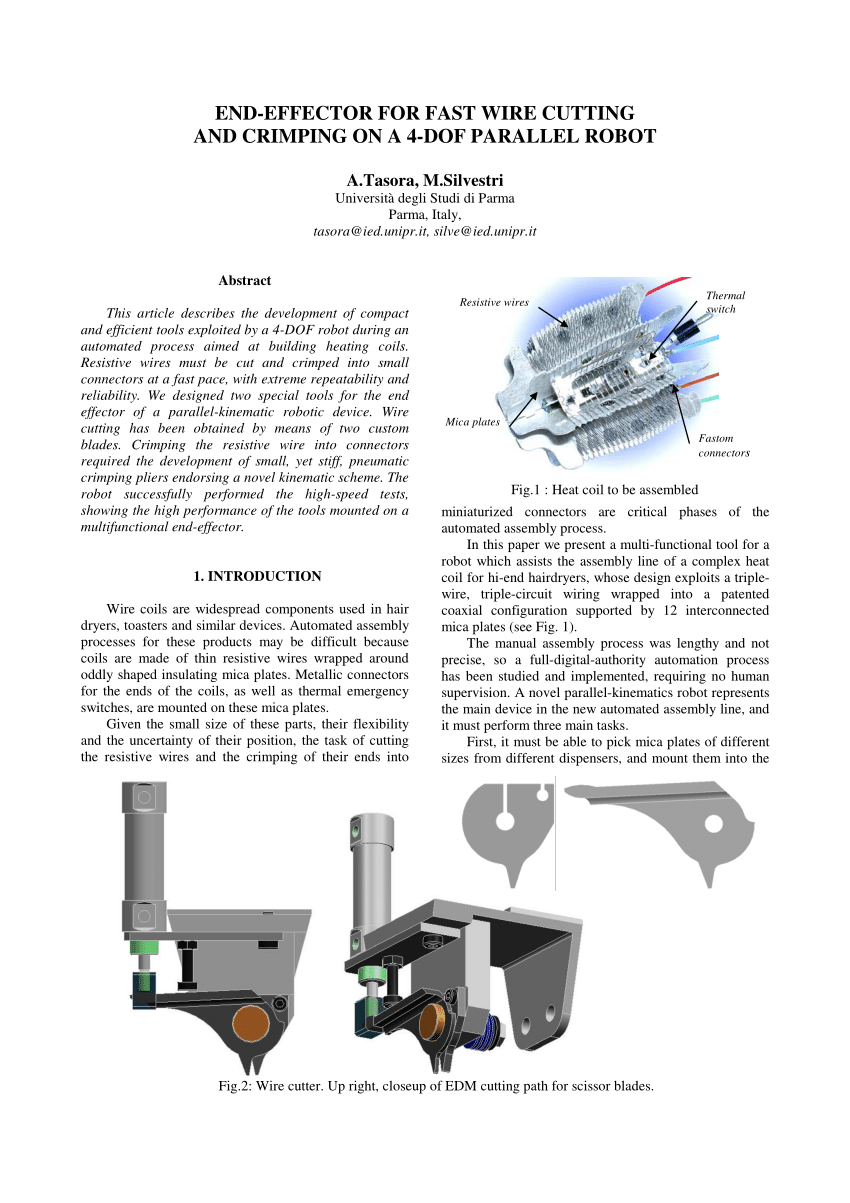
Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot

Pdf Robotics 1 Lecture 7 End Effectors
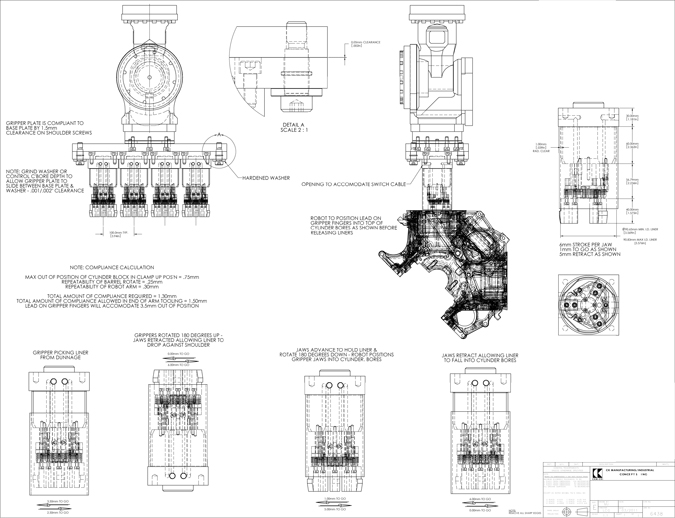
Ck Manufacturing Industrial Manufacturing Military Manufacturing Industrial Design Gantry Robot End Effectors Pick And Place Elevators Buffer Storage Automation Elevators Tip Ups Barrel Type Rotates End Effectors

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy Robot Gripper Robot Arm Robot Design

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy Robot Gripper Robot Arm Robot